Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'control systems'
control systems published presentations and documents on DocSlides.
Fractional
by natalia-silvester
Order Motion Controls: How . Motion/. Process. ....
Bob Ettinger
by marina-yarberry
Flight Test Manager. Northrop Grumman Aerospace S...
Information security
by kittie-lecroy
Challenges . faced by a large financial services ...
New Technology keywords Codierung stimmt noch nich t Final version in
by alexa-scheidler
1 Automation Robotics Control Systems 001001001 12...
UserDriven Access Control Rethinking Permission Granting in Modern Operating Systems Franziska Roesner Tadayoshi Kohno franzi yoshi cs
by conchita-marotz
washingtonedu University of Washington Alexander M...
RED Remote Ethernet Device is a remote control for Audia and Nexia systems
by sherrill-nordquist
It offers a simple LQWXLWLYH57347LQWHUIDFH57347IR...
SYNCHRONISATION OF TWO CAMCORDERS WITH PI CONTROLLER D LANC MASTER Damir Vran Department of Systems and Control J
by kittie-lecroy
Stefan Institute Jamova 39 SI1000 Ljubljana Slove...
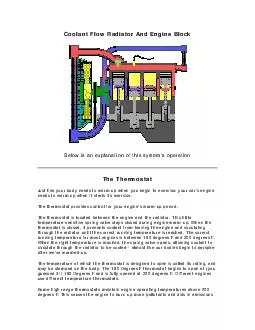
Coolant Flow Radiator And Engine Block Below is an explanation of this systems operation The Thermostat Just like your body needs to warm up when you begin to exercise your cars engine needs to warm
by pasty-toler
The thermostat provides control fo r your engines...
INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS VOL
by tawny-fly
1 NO 1 JANUARY 2012 41 Abstract increased competi...
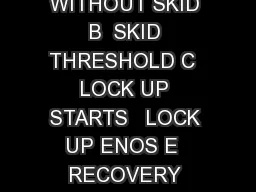
WHEEL SPEED BRAKE PRESSURE TIME A SLIP WITHOUT SKID B SKID THRESHOLD C LOCK UP STARTS LOCK UP ENOS E RECOVERY Chapter III Antiskid Brake Control Systems A
by cheryl-pisano
System Operation The amount of braking the pilot ...
static speed control system for triaxial telescope scanning axis SUBBOTIN DMITRII Department of Electrotechnics and Precision Electromechanical Systems University ITMO Saint Petersburg Kronverkskiy
by alida-meadow
49 RUSSIAN FEDERATION e mail SubbDmyandexru SERGE...
MULTISCALE SINGULARLY PERTURBED CONTROL SYSTEMS LIMIT OCCUPATIONAL MEASURES SETS AND AVERAGING VLADIMIR GAITSGORY AND MINHTUAN NGUYEN SIAMJ
by yoshiko-marsland
C ONTROL PTIM 2002SocietyforIndustrialandAppliedMa...
Systems Analysis and Control Matthew M
by pasty-toler
Peet Illinois Institute of Technology Lecture 19 ...
Proceedings IROS Conference on Intelligent Robots and Systems Takamatsu Japan Planning and ModelBased Control for Mobile Manipulators Evangelos Papadopoulos and John Poulakakis Department of Mechani
by phoebe-click
This paper presents a planning and control method...
Linear Contr ol Systems Lectur Contr ollability Motiv ating Example roc et in er tical motion ma be modeled mg altitude elo cit mass thrust force h m Can nd contin uous control er the per iod to mo
by alida-meadow
It is positiv semide57346nite because 0 At dt or ...
Systems Control Letters NorthHolland A polynomial matrix method for computing stable rational doubly coprime factorizations Kenji SUGIMOTO Department of Information Technology Faculty of Engine
by tatiana-dople
In contrast to the wellknown method which require...
State and Output Feedback Nonlinear Model Predicti Control An Ov ervie Rolf Findeisen Lars Imsland Frank Allg ower Bjarne A
by yoshiko-marsland
oss Institute for Systems Theory in Engineering U...
Nonlinear Systems and Control Lecture Exponential Stability Region of Attraction p
by liane-varnes
118 brPage 2br Exponential Stability The origin o...
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY VOL
by pasty-toler
18 NO 2 MARCH 2010 267 Fast Model Predictive Cont...
Gimbals Drive and Control Electronics D esign Development and Testing of the LRO High Gain Antenna and Solar Array Systems Boris Chernyakov and Kamal Thakore Abstract Launched June on an At las V
by danika-pritchard
The spacecraft SC carries a wide variety of scien...
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
by yoshiko-marsland
245 MULTIVARIABLE CONTROL SYSTEMS by A Megretski A...
Part IB Paper Information Engineering LINEAR SYSTEMS AND CONTROL Glenn Vinnicombe HANDOUT Stability and pole locations asymptotically stable marginally stable unstable Real s Imag s Right half plan
by min-jolicoeur
When designing a feedback system the most basic o...
Executive summary Digital motor control was first introduced to overcome the challenges that traditional analog systems had in handling drift ag ing of components and variations caused by temperature
by alexa-scheidler
Flexible software algo rithms not only eliminated...
ELECTRIC VEHICLE CONTROL SYSTEMS CONTENTS GLOBAL VIEW GROUP OVERVIEW MILESTONES RELIABLE QUALITY PORTFOLIO OF PRODUCTS ENVIRONMENT PARTNER WITH PERFORMANCE Today across the globe electric
by tatyana-admore
For many years they have provided effective trans...
otential and Kinetic Shaping for Control of Underactuated Mechanical Systems Anthony M
by kittie-lecroy
Bloch Department of Mathematics University of Mic...
Linear Variable Differential ransformers VDT From Sensors to Systems more feedback more information more control more performance www
by calandra-battersby
pennyandgilescom Our acknowledged leadership in LV...
Control design with guaranteed ultimate bound for feedback linearizable systems Ernesto Kofman Fernando Fontenla Hernan Haimovich Mara M
by danika-pritchard
Seron CONICET Depto de Electr57524onica Fac de Cs...
Chemical Engineering Science Robust control of IO linearizable systems via multimodel synthesis Soumitri Kolavennu Srinivas Palanki Juan C
by giovanna-bartolotta
Cockburn Department of Chemical Engineering Flori...
GENERALIZED MINIMUM VARIANCE ONTROL OF CONSTRA NED MUL TI VARIABLE SYSTEMS Labo ra oire dAutomatique An des Systeme du C
by tawny-fly
N RS 7 ve ue du Colone Ro e 31 077 To louse Ce ex ...
Aalborg Universitet Multiobjective Control for Multivariable Systems with Mixedsensitivity Specifications Stoustrup Jakob Niemann H
by pamella-moone
H Published in International Journal of Control DO...
Hierarchical and Statebased Architectures for Robot Behavior Planning and Control Philipp Allgeuer and Sven Behnke Autonomous Intelligent Systems Computer Science Institute VI University of Bonn Germ
by lindy-dunigan
unibonnde behnkecsunibonnde httpaisunibonnde Abstr...
Control Systems Lecture RHP poles and zero limitations how to design and ride a bike Roy Smith
by debby-jeon
1 Nonminimum phase behaviour stable systems Righth...
The Effect of NonminimumPhase Zero Locations on the Perform ance of Feedforward ModelInverse Control Techniques in DiscreteTime Systems Jeffrey A
by trish-goza
Butterworth Lucy Y Pao and Daniel Y Abramovitc Ab...
Nonlinear Systems and Control Lecture Bifurcation p
by giovanna-bartolotta
1 brPage 2br Bifurcation is a change in the equi...
Nonlinear Systems and Control Lecture Circle Popov Criteria p
by min-jolicoeur
124 brPage 2br Absolute Stability r u y The syste...
PROPULSION CONTROL SYSTEMS At Wrtsil we strive constantly to do what is best for the customer
by briana-ranney
This includes optimising the lifecycle value of t...
in detail MARINE IN DETAIL MARINE IN DETAIL In RD activities were initiated within Wrtsils Product Centre Automation with the aim of better aligning the design of the propulsion control systems
by alexa-scheidler
57346e technology in use at the time was simply n...
Systems Analysis and Control Matthew M
by calandra-battersby
Peet Illinois Institute of Technology Lecture 10 ...
NPTEL Mechanical Engineering Modeling and Control of Dynamic electroMechanical System Module Lecture Dynamic Response of Second Order Systems Dr
by tawny-fly
Bishakh Bhattacharya Professor Department of Mech...
State variables and SISOMIMO control systems
by luanne-stotts
State variable model for a dynamic system This ty...
Load More...