Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robot-Manipulator'
Robot-Manipulator published presentations and documents on DocSlides.
Maker Education Manipulator
by kimberly
A guest education robot. Lesson 11 Flashing LED li...
Brake Drum Manipulator
by pasty-toler
Chris “that guy” Adams. Alex “Terminator”...
Introduction to Robotics
by min-jolicoeur
cpsc. - 460. Textbook. Robot Modeling and Contr...
Object Manipulation
by danika-pritchard
By: Brandon Blakemore . What is Object Manipulati...
Robot Quiz Day 1 What is a Robot?
by kittie-lecroy
A machine that does work on its own. A device tha...
Administration
by jordyn
U.S. Food & Drug 10903 New Hampshire Avenue Doc ID...
Becoming A Master Manipulator
by mojartd
Using Macro Functions To Manipulate SAS® Enterpri...
1 NERVA Engine Maintenance
by carneos
Assembly . and . Disassembly (E-MAD). Harold P. Ge...
Singularities, Stable Surfaces, and Repeatable Behavior
by test
Rodney G. Roberts. Anthony . Maciejewski. Present...
Example of dynamics computation EulerLagrange and NewtonEuler formulations PrismaticPrismaticPrismatic PPP manipulator link Cartesian manipulator Solution to Problem
by giovanna-bartolotta
7 Consider a PrismaticPrismaticPrismatic PPP manip...
Dominating Manipulations in Voting with Partial Information
by conchita-marotz
Paper by: . Vincent . Conitzer. , Toby Walsh. an...
RAS MiniBendCenter
by trish-goza
L. min. = 50 mm. L. max. = 600 mm. B. min. = 4...
5 Redundant Actuation of Parallel Manipulators Andreas M
by ellena-manuel
Source: Parallel Manipulators, Towards New Applica...
__________________ Corresponding author Emailjanrosellupcedu Ja
by hanah
In work environments, the use of dexterous mobile ...
Intro to Movement of robots and introduction to kinematics of robots
by alida-meadow
Kinematics: . constraints on getting around the ...
Healthcare Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Healthcare Robotics Market Report published by val...
Home Care Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Home Care Robotics Market report provides the futu...
Robot Web Quest
by kittie-lecroy
Save a copy of this . powerpoint. – click on l...
directionofmotion
by natalia-silvester
Robot Obstacle domainofresponsibility (a)Robottobl...
ROBOT SENSORS AND ROBOT VISON
by marina-yarberry
T. . Bajd. and M. . Mihelj. Proprioceptive senso...
Non-Explicit Communication with Robotic Manipulators: A Review
by hailey
Paul M. Calhoun. What Is It?. C. ommunication with...
Mechanism Design Collectors - Manipulators - Shooters
by min-jolicoeur
Roller Collectors. Lucien Junkin - 118. Robonauts...
Magneto coupled actuators
by natalia-silvester
Intern: Erick Yanez . Mentor: Shea Ferring. NASA...
Intuitive Kinematics – Converting Between Forward and Reverse Definitions of Space
by alexa-scheidler
Lecture Series 2. ME 4135 . R. R. Lindeke. Intui...
Optimization of Pallet Packaging Space and a Robotic SCARA Manipulator for Package Stacking
by luanne-stotts
Group-4. Puneet Jethani. Erica . Neuperger. Siddh...
Goal Directed Design of Serial Robotic Manipulators
by cheryl-pisano
Apr 4, 2014. Sarosh Patel & . Tarek. . Sobh....
Proceedings IROS Conference on Intelligent Robots and Systems Takamatsu Japan Planning and ModelBased Control for Mobile Manipulators Evangelos Papadopoulos and John Poulakakis Department of Mechani
by phoebe-click
This paper presents a planning and control method...
A Lowcost Compliant DOF Robotic Manipulator Morgan Quigley Alan Asbeck and Andrew Y
by lois-ondreau
Ng Abstract We present the design of a new lowco...
Proceedings IROS Conference on Intelligent Robots and Systems Takamatsu Japan Planning and ModelBased Control for Mobile Manipulators Evangelos Papadopoulos and John Poulakakis Department of Mechani
by yoshiko-marsland
This paper presents a planning and control method...
Whole Arm Planning for a Soft and Highly Compliant D Robotic Manipulator Andrew D
by tawny-fly
Marchese Robert K Katzschmann and Daniela Rus Abs...
Placement of Robot Manipulators to MaximizeDexterityKarim Abdel-Malek
by jane-oiler
IntroductionManipulator placement in an environmen...
Dynamics of Robot Manipulators
by giovanna-bartolotta
Purpose:. This chapter introduces the dynamics of...
Robotics, Intelligent Sensing and Control Lab (RISC)
by tatiana-dople
University of Bridgeport. Department of Computer ...
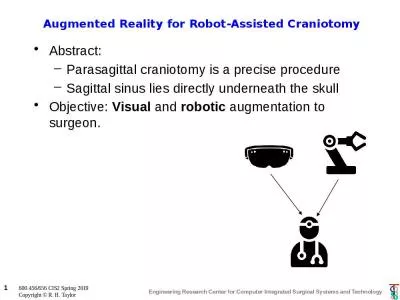
Augmented Reality for Robot-Assisted Craniotomy
by bryan633
Abstract:. Parasagittal craniotomy is a precise pr...
Open versus Robotic REtrOmuscular Ventral Hernia Repair:
by kyrie584
Preliminary outcomes of ORREO trial. Jeremy Warren...
That’s Hot! Robot Brain Programming
by emory
Engineering Challenge. 2. Program your . TaskBot. ...
Designing a robot that can perform the duties of an assistant referee during a football game on the
by hadley
Design a football robot referee. Stay safe. . ...
Exploring Educator Perceptions of Gender and Robotics
by deena
A case study of the I-SET Robotics, a community en...
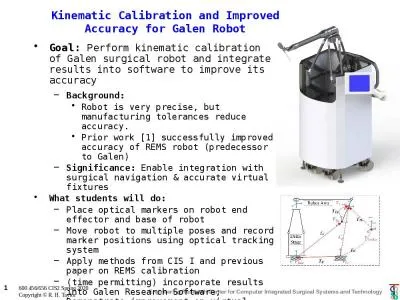
Kinematic Calibration and Improved Accuracy for Galen Robot
by elyana
Goal: . Perform kinematic calibration of Galen sur...
ROBOTIC TOTAL KNEE ARTHROPLASTY
by valerie
COMMON CAUSES OF PERSISENT KNEE PAIN. TREATMENT FO...
Load More...