Browse
Contact
/
Login
Upload
Search Results for 'If The Robot Has More Than One Leg Leg Coordination For Loco'
Control Engineering Practice Designing a Fuzzylike PD controller for an underwater
giovanna-bartolotta
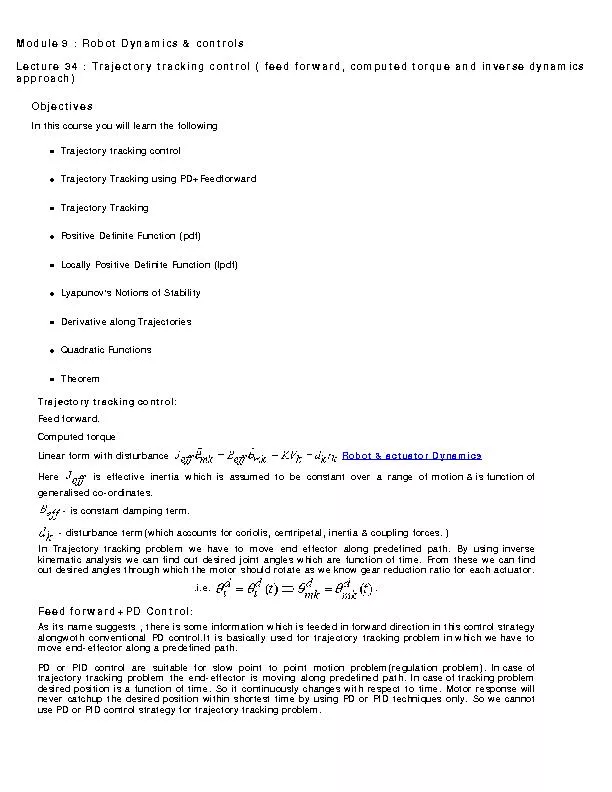
Untitled Documentfile:///E|/HTML-PDF-conversion/7--112101098/Module%20
min-jolicoeur
Placement of Robot Manipulators to MaximizeDexterityKarim Abdel-Malek
jane-oiler
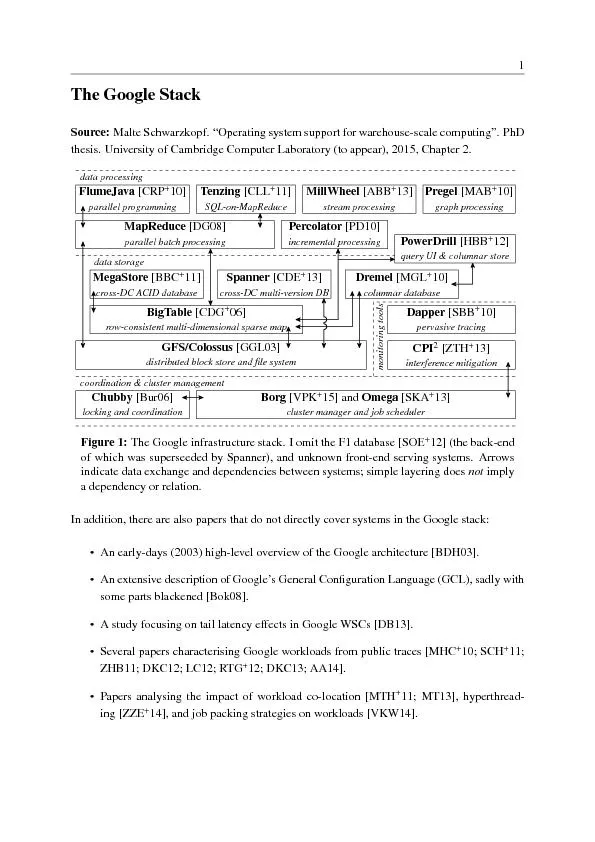
TheGoogleStackSource:MalteSchwarzkopf.“Operatingsystemsupportforw
liane-varnes
SECOND MEETING OF THE IHO REGIONAL COORDINATION COMMITTEE
giovanna-bartolotta
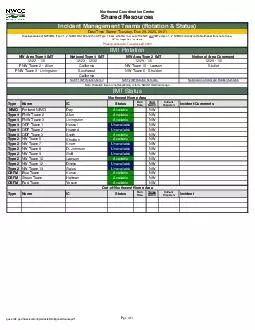
Northwest Coordination Center
lois-ondreau
Atom™ quad core 1.91 GHz processor, featuring minimal footprint a
marina-yarberry
Page of Northwest Interagency Coordination Center Morning Brief Wednesday Octobe
natalia-silvester
2 Revision 0 Author Daniel M
faustina-dinatale
Abstract In this working paper we present first results from ethnographic research into
jane-oiler
robot.Ottetal.[7]proposedtouseaspringmodel,inwhichcontrolpointsonthero
conchita-marotz
CAD/CAM Presentation
karlyn-bohler
Convergence in multiagent coordination consensus and flocking
cheryl-pisano
Accurate Mobile Robot Localization in indoor environments using Bluetooth Aswin N Raghavan
faustina-dinatale
Robot Learning Manipulation Action Plans by Watching Unconstrained Videos from the World
liane-varnes
Robot Electronics R1 = 68.1k
min-jolicoeur
September International Space Exploration Coordination Group Table of Content Executive
marina-yarberry
MSE508/L SP08 In-Class Assignment
test
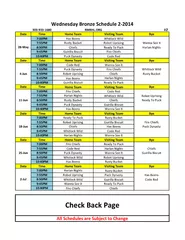
Visiting Team
tatiana-dople
Computer and Robot Vision II
tatiana-dople
Military Robots
natalia-silvester
Robot Electronics R1 = 68.1k
briana-ranney
Actuator Networks for Navigating an Unmonitored Mobile Robot Jeremy Schiff Anand Kulkarni
lois-ondreau
Multichannel customer management is the design deployment coordination and evaluation
tatyana-admore
18
19
20
21
22
23
24
25
26
27
28





![robot.Ottetal.[7]proposedtouseaspringmodel,inwhichcontrolpointsonthero](https://thumbs.docslides.com/359853/robot-ottetal-7-proposedtouseaspringmodel-inwhichcontrolpoi.jpg)