Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for ''
published presentations and documents on DocSlides.
Robot Control Open Loop Control
by ellena-manuel
Sends commands to make a robot preform some movem...
I can design and annotate a robot
by teresa
What are robots?. . What are they used for? . Wha...
16-311 Lab 8
by tatyana-admore
Wheel Free. Lead TAs: . Joon-Hyuk Han. Josh Yu. A...
The cyborg of our time
by bikersnomercy
Rat. . Brain. . Robot. Hugo Ribeiro . Baldioti. ...
USAR:
by sherrill-nordquist
Earthrise & robot issues. Samantha Tan & ...
Team 5282
by test
Durand, MI - Railroaders. Field Layout. Field Dim...
From Imprinting to Adaptation: Building a History of Affect
by alida-meadow
Written by Arnaud J. Blanchard & Lola . Canam...
Learning Classifier Systems
by min-jolicoeur
Mobile Robot Control. XCS and Implementation. XCS...
1 Dynamic Programming (1)
by pasty-toler
2. Dynamic Programming. The . dynamic programming...
By: Payton Chase Blodgett
by tawny-fly
How to Make an Award Worthy Engineering Notebook....
1 Dynamic Programming (1)
by kittie-lecroy
2. Dynamic Programming. The . dynamic programming...
Robotics for Manufacturing
by lindy-dunigan
A Michigan Robotics Focus Area:. Contributing Fac...
HelperTech
by alida-meadow
Snow Removal Robot – . RoboBlow. April 18, 2011...
Control 3 Motion Control (kinematic control)
by lindy-dunigan
for mobile platform. The objective of a kinematic...
Rogi 2 Team DescriptionJosep Lluís de la Rosa, Rafel García, Bianca
by elizabeth
M. Veloso, E. Pagello, and H. Kitano (Eds.): RoboC...
�� Study of a Home Robot: JIBO Pranav Rane, Varun Mhat
by alyssa
Fig 1. Structure Of JIBO International Journal o...
Find more information at wwwzacoroboteu
by margaret
ZACO-A10Robot Vacuum CleanerUser Manual ZACO-A ...
School of Informatics and Computing Indiana University Bloomington IN
by dora
uses controlled sensory stimulation in a non-threa...
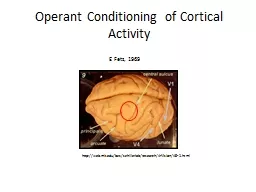
Operant Conditioning of Cortical Activity
by samantha
http://web.mit.edu/bcs/schillerlab/research/A-Visi...
Reviewing Effectiveness Of Ankle Assessment Techniques For Use In Robot-assisted Therapy
by margaret
by. Mingming. . Zhang. University of Auckland. Au...
Can a Humanoid Robot Spot a Liar?
by obrien
2018 IEEE-RAS 18. th. International Conference on...
(Vision Centric Challenge) 2020 Rules
by oryan
CBC . (Construction Barrel Course) . V . 1.2 – F...
A Formal Semantics for Brahms
by sherrill-nordquist
Presented by Richard Stocker. In co-operation wit...
FRC Game Analysis and Design Strategy
by debby-jeon
Caleb Sykes. Mentor, FRC 4536. About me. Caleb Sy...
Introduction to Control
by cheryl-pisano
ECE383 / ME 442 Fall 2015. Kris Hauser. Motors. I...
Planning an A level Unseen: SCASI
by danika-pritchard
Monday, 19 March 2018. August 2026: There Will Co...
Path Control in Robotics
by test
ME . 4135, F 2012. Richard . R. Lindeke, Ph. D.. ...
Autonomous Cyber-Physical Systems:
by liane-varnes
Temporal Logic. Spring 2018. CS 599.. Instructor:...
wwwbritishcouncilorglearnenglishkids
by jainy
British Council 2020The United Kingdoms internatio...
Path Control in Robotics
by alida-meadow
ME 4135. Richard . R. Lindeke, Ph. D.. Motion Typ...
About OMICS Group
by calandra-battersby
. OMICS Group International is an amalgamat...
About OMICS Group
by myesha-ticknor
. OMICS Group International is an amalgamat...
Ramping Up Speed
by debby-jeon
w. ith Mesa Robot Works FLL #52. Learn what ramp ...
Announcements
by debby-jeon
HW 6: . Written (not programming) assignment. ....
ECGR4161/5196 – Lecture
by lindy-dunigan
15 . – . August 7, . 2012. Today:. Presentation...
A CAD
by luanne-stotts
platform based on human-molecule interface. Why d...
Visiting Team
by tatiana-dople
303-933-1680 V2 Date Time Home Team Bye 7:00PM Has...
Emotion and Sociable Humanoid Robots (Cynthia Breazeal)
by sherrill-nordquist
Yumeng. Liao. Usually, robots are designed as au...
Vision-Guided Humanoid Footstep Planning for Dynamic Enviro
by calandra-battersby
P. Michel, J. . Chestnutt. , J. . Kuffner. , T. ....
RGB,
by sherrill-nordquist
HSL, . HSV. HSL, HSV: easier to define, closer to...
Load More...