Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'point image'
point image published presentations and documents on DocSlides.
3D Vision Topic 3 of Part II
by test
Stereo Vision. CSc. I6716. Fall . 2010. Zhigang ...
3D Sensing and Mapping Intelligent Robotics
by min-jolicoeur
Spring 2014. Kris Hauser. Agenda. A high-level ov...
9-3: Rotations Rigor : Students will rotate figures about a point
by phoebe-click
on and off the coordinate plane.. Relevance:. Ro...
PowerPoint Exercises Complete each exercise, then save the file and upload it to the course website
by giovanna-bartolotta
Crop this image tightly around the monkey.. Apply...
School of Chemical &
by tatyana-admore
Biomolecular. Engineering. Your Name. Name of Co...
Warm Up What is the translation rule?
by yoshiko-marsland
What is the image after reflecting (2, 3) over th...
Title of Poster using Sans Serif Minimum
by debby-jeon
70 . Pt. Author Names . and Author Affiliations....
Concave and Convex
by danika-pritchard
MIRRORS. Concave Mirrors. A con. cave. mirror ha...
Multi-view geometry
by tawny-fly
Multi-view geometry problems. Structure: . Given ...
PowerPoint Exercises
by ellena-manuel
Complete each exercise, then save the file and up...
Single-view geometry
by olivia-moreira
Odilon Redon, Cyclops, 1914. Our goal: Recovery o...
7.1 – Rigid Motion in a Plane
by giovanna-bartolotta
Preimage. , Image. P . . P. ’. G:...
See-and-Avoid System for UAV with Five Miniature Cameras
by stefany-barnette
Tamás Zsedrovits. †. , . Ákos. . Zarándy. *...
Unit 2: Photography
by yoshiko-marsland
Digital Communications II. Digital. SLR and Point...
362105
by faustina-dinatale
PEA:. . P. oint, . E. vidence, . A. nalysis . Yo...
3D Sensing and Mapping
by ellena-manuel
Intelligent Robotics. Spring . 2014. Kris Hauser....
Xiaoguang Han
by phoebe-click
Department of Computer Science. Probation talk �...
RADNEXT Work Package 10 Proton and Heavy-Ion Facilities
by erica
1. Françoise BEZERRA, CNES, France (WP Leader), ....
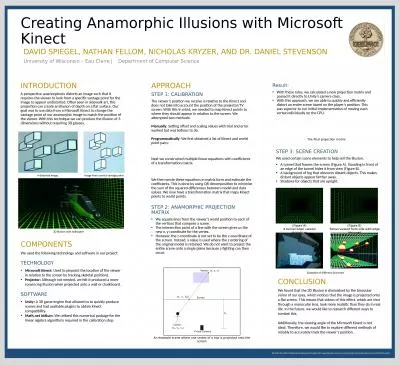
Creating Anamorphic Illusions with Microsoft Kinect
by jones
University of Wisconsin – Eau Claire | Depart...
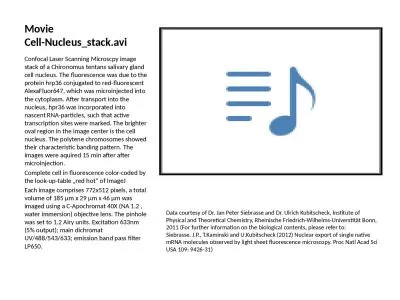
Movie Cell-Nucleus_stack.avi
by jaena
Confocal Laser Scanning . Microscpy. image stack ...
TRANSFORMATIONS in the Coordinate Plane
by iris
Review:. A . TRANSFORMATION . is . . . .. . . . wh...
Physics 598 BP: Experimental
by esther
Biophysics. Paul Selvin . (Instructor—Lectures)....
Spherical Aberration Rays emanating from an object point that are incident on a spherical mirror or
by delilah
positions.. Definition:. Diagram:. Diagram:. Diagr...
Physics 1025F Geometric Optics
by kimberly
Dr. Steve Peterson. Steve.peterson@uct.ac.za. OPTI...
Composition of Transformations:
by reagan
The Glide Reflection. Big Ideas Geometry Section 4...
Intro to 3D + Camera Calibration
by paige
EECS 442 – Prof. David . Fouhey. Winter 2019, Un...
CS 1674: Intro to Computer Vision
by queenie
Fitting Models: . Hough Transform . & RANSAC. ...
Homogenous coordinates Putting everything together
by emery
Change coordinate system so that center of the coo...
THE SCHOOL OF ATHENS Art Selection #7, pp. 80-5,
by callie
. Raphael . (. Raffaello. . Sanzio. ), c. 1508–...
The Human Eye http:// medilinks.blogspot.com
by martin
/2011/09/. seq. -paper-of-eye-. rawalpindi. -. med...
TP12 - Local features: detection and description
by reagan
Computer Vision, FCUP, . 2018/19. Miguel Coimbra. ...
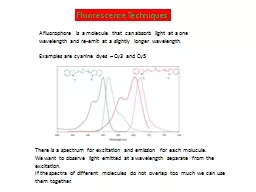
A fluorophore is a molecule that can absorb light at a one wavelength and re-emit at a slightly lon
by skylar
Examples are cyanine dyes – Cy3 and Cy5 . There ...
METHOD OF IMAGES Class Activities: Method of Images
by catherine
Whiteboard: . Calculate voltage . (everywhere in ...
Name Name Name Department
by samantha
Institution. Date. Replace this box with key image...
EUROGRAPHICS 2001 A Chalmers and TM RhyneVolume 20 2001 Numbe
by tabitha
AbstractWe present JAPE, a flexible prototyping sy...
Lecture 18: Cameras CS4670 / 5670: Computer Vision
by greyergy
KavitaBala. Source: S. Lazebnik. Announcements. Pr...
An Introduction to Adaptive Optics
by inventco
Julian C. Christou, Gemini Observatory. With added...
This is a cover slide This is a subheading
by dudeja
aestiaessum. . quas. . simagnis. . molorumet. J...
S canner for Automated 3D Modeling of Small Objects
by stefany-barnette
S canner for Automated 3D Modeling of Small Objec...
FIXED POINTS AND FREEZING SETS IN DIGITAL TOPOLOGY
by karlyn-bohler
FIXED POINTS AND FREEZING SETS IN DIGITAL TOPOLOG...
Load More...