Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for ''
published presentations and documents on DocSlides.
Automated Computation of One-Loop Amplitudes
by pamella-moone
Darren Forde. (SLAC & UCLA). Work in collabor...
Pid controller pole/zero cancellation
by olivia-moreira
By Frank Owen, PhD, PE. polyXengineering, Inc.. S...
ME190L Nyquist Stability Criterion
by min-jolicoeur
UC Berkeley. Fall 2010. http://jagger.me.berkeley...
Pid controller
by calandra-battersby
pole/zero cancellation. By Frank Owen, PhD, PE. p...
Maximal
by natalia-silvester
Unitarity. . at Two Loops. David A. Kosower. Ins...
Modern
by tatyana-admore
Control . Systems (MCS). Dr. Imtiaz Hussain. Assi...
Modern
by kittie-lecroy
Control . Systems (MCS). Dr. Imtiaz Hussain. Assi...
Control Systems (CS)
by tatiana-dople
Dr. Imtiaz Hussain. Associate Professor. Mehran U...
Dr. Imtiaz Hussain
by lindy-dunigan
Associate Professor. Mehran University of Enginee...
Stability analysis of time domain systems
by ellena-manuel
S-Plane: Poles and Zeros . A linear system can b...
PD design via root locus
by conchita-marotz
By Frank Owen, PhD, PE. polyXengineering, Inc.. S...
Professor Walter W. Olson
by alexa-scheidler
Department of Mechanical, Industrial and Manufact...
Portable 20 Meter Delta Loop
by ellena-manuel
Mike Yamamoto. KI6OID. These two images were the ...
Professor Walter W. Olson
by min-jolicoeur
Department of Mechanical, Industrial and Manufact...
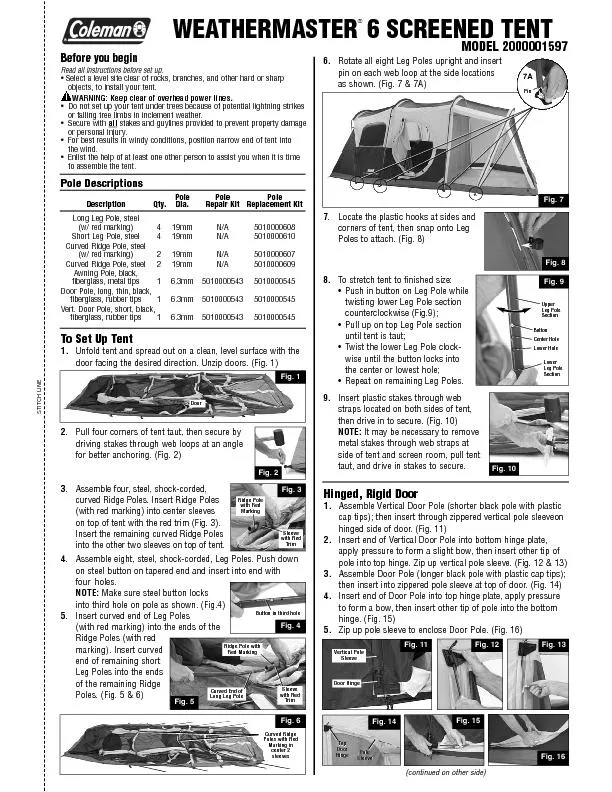
6.Rotate all eight Leg Poles upright and insertpin on each web loop at
by tatiana-dople
STITCH LINE Fig. 6 Fig. 7 7A .Locate the plastic h...
Control Systems
by cheryl-pisano
Lect.6 Stability. Basil Hamed. Chapter 6. After ...
Control Systems
by cheryl-pisano
Lect.8 . Root Locus Techniques. Basil Hamed. Cha...
M A G
by calandra-battersby
N. E. T. IC. . E. F. F. E. C. T. . O. F. . C. ...
Modern
by lois-ondreau
Control . Systems (MCS). Dr. Imtiaz Hussain. Assi...
Build
by natalia-silvester
a DC motor. Prof. Anderson. Electrical and Comput...
Portable
by olivia-moreira
20 Meter. Delta Loop. Mike Yamamoto. KI6OID. Thes...
Frequency-Domain Analysis and stability determination
by marina-yarberry
frequency-response studies. In practice, the perf...
Frequency-Domain Analysis and stability determination
by alida-meadow
frequency-response studies. In practice, the perf...
Professor Walter W. Olson
by luanne-stotts
Department of Mechanical, Industrial and Manufact...
Magnets Poles of a magnet are the ends where objects are most strongly attracted
by karlyn-bohler
Two poles, called . north. and . south. Like pol...
EE392m Winter 2003Control Engineering61AnalysisStabilityPerformanc
by joyce
EE392m - Winter 2003Control Engineering6-2Lyapuno...
Properties of Root Locus
by PlayfulPenguin
Lesson . Objectives. : After finish this lesson, ...
Load More...