Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for ''
published presentations and documents on DocSlides.
Mobile Robot Localization and Mapping with Uncertainty usin
by pamella-moone
Paper – Stephen Se, David Lowe, Jim Little. Pre...
SIFT features [3] were computed for 100 images (from
by celsa-spraggs
ImageNet. [4]) for each of our 48 subordinate-le...
SIFT features [3] were computed for 100 images (from
by kittie-lecroy
ImageNet. [4]) for each of our 48 subordinate-le...
Lecture 6: Feature matching
by myesha-ticknor
CS5670: Computer Vision. Noah Snavely. Reading. S...
Feature Tracking and Optical Flow
by fiona
Computer Vision. Jia-Bin Huang, Virginia Tech. Man...
pplication of KAZE
by leah
T he A F eatures to the C lassification Echocard...
Interest Points Computer Vision
by fluental
Jia-Bin Huang, Virginia Tech. Many slides from N S...
Special Topic on Image Retrieval
by karlyn-bohler
2014-03. Popular Visual Features. Global feature....
Patch Descriptors
by tatyana-admore
CSE P 576. Larry Zitnick (. larryz@microsoft.com....
Perception for Robot Detection
by calandra-battersby
2011/12/08. Robot Detection. Robot Detection. Bet...
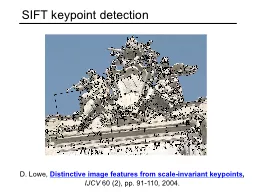
SIFT
by pamella-moone
keypoint. detection. D. Lowe, . Distinctive . im...
Load More...

![SIFT features [3] were computed for 100 images (from](https://thumbs.docslides.com/562223/sift-features-3-were-computed-for-100-images-from-.jpg)
![SIFT features [3] were computed for 100 images (from](https://thumbs.docslides.com/416353/sift-features-3-were-computed-for-100-images-from.jpg)