Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robotics-Aerial'
Robotics-Aerial published presentations and documents on DocSlides.
CS491/691: Introduction to Aerial Robotics
by stefany-barnette
YOUR TEAM NAME. YOUR PROJECT NAME. Motivation and...
CS491/691: Introduction to Aerial Robotics
by test
YOUR TEAM NAME. YOUR TOPIC TITLE (CONTROL, ESTIMA...
CS491/691: Introduction to Aerial Robotics
by natalia-silvester
YOUR TEAM NAME. YOUR TOPIC TITLE (CONTROL, ESTIMA...
Wedding Performance Dance Group
by bittersweetfitstudio
Bittersweet Studios is the first co-ed alternativ...
Freeview aerial guide Do I need an aerial How do I check that my aerial works Yes Freeview is received through the TV aerial so once you know you are in coverage all you need is a correctly aligned a
by tawny-fly
You can check the channels available at your addr...
Healthcare Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Healthcare Robotics Market Report published by val...
Home Care Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Home Care Robotics Market report provides the futu...
Aerial Lift Safety Introduction
by caitlin
About this Power Point Presentation . This PPT was...
ANCIENT ARTWORK IN PERU SPOTTED BY DRONES
by beverlyhillsaerials
The mountainous and rugged terrain of Peru’s des...
DRONES AND PRIVACY; A MATTER OF PUBLIC CONCERN?
by beverlyhillsaerials
For some, drones and where they can and cannot be ...
Aerial Application A Vital Component
by lindy-dunigan
of Production Agriculture. Ag Aviation History. 1...
Aerial Lift / Sissor Lift Safety
by trish-goza
An aerial lift is any vehicle-mounted device used...
Aerial Photography Scott Hull
by briana-ranney
GSFC Photo Club. 5/9/2012. Topics. What to shoot....
Unmanned Aerial System
by debby-jeon
C3C Matthew Jordan. What is an Unmanned Aerial Sy...
Accessing the FDOT Aerial Photography
by pasty-toler
Collection Using. APLUS. Stuart Korte. FDOT Surve...
A abbreviated history of aerial photography and digital rem
by pasty-toler
CWU, . Geog. 430. With special thanks to. http:...
INTRODUCTION TO UNMANNED AERIAL SYSTEMS
by sherrill-nordquist
DRONES 101. United States Association of Unmanned...
Pole Dancing Classes Jacksonville
by bittersweetfitstudio
Bittersweet Studios is the first co-ed alternative...
Aerial Application
by stefany-barnette
A Vital Component . of Production Agriculture. Ag...
Using Georeferenced Aerial Photography to Reconstruct Peatl
by phoebe-click
Changes . Alex Foster. Supervisors: Drs. Murray R...
Accessing the FDOT Aerial Photography
by natalia-silvester
Collection Using. APLUS. Stuart Korte. FDOT Surve...
Aerial Photography for Archaeology
by tatyana-admore
Monte Alban in southern Mexico. Learning Objectiv...
Exploring Educator Perceptions of Gender and Robotics
by deena
A case study of the I-SET Robotics, a community en...
Robotics Competition Turning PointAppendix E
by beatrice
vexrobotics.comCopyright 201, VEX Robotics Inc. 1 ...
Robotics Competition Turning PointAppendix E
by mila-milly
vexrobotics.comCopyright , VEX Robotics Inc.2018 1...
Trends in Teaching Robotics to UG/PG
by shangmaxi
Students. [. Teaching Robotics: 6 years]. [Total t...
Robotics Club Robotics Club, College of Engineering Adoor
by sportyinds
AIMS . OBJECTIVES. PAST EVENTS. PAST PROJECTS. EXI...
ROBOOTIKA http://www.scoop.it/t/robotics-by-liia-lees
by garboardcola
Liia Lees. TLÜ Haapsalu kolledž. 2014. Mis on RO...
ROBOOTIKA http://www.scoop.it/t/robotics-by-liia-lees
by carneos
Liia Lees. TLÜ Haapsalu kolledž. 2014. Mis on RO...
Robotics Engineers FUTURE JOBS READERS Level 1- ① Thinking about how to solve problems
by jane-oiler
Robotics Engineers FUTURE JOBS READERS Level 1- �...
The M.S . Degree in Robotics Engineering
by test
A multidisciplinary degree spanning Computer Scie...
JUNK DRAWER ROBOTICS Train the Trainer (TOT)
by celsa-spraggs
Junk Drawer Robotics – Curriculum Overview. Wha...
ROBOTICS Project by- V.Bindiya ,
by yoshiko-marsland
Narayana IIT Olympiad School. Robotics. Robotic ....
Apple P Robotics Introduction for New Recruits
by min-jolicoeur
9-12-18. Apple Pi Robotics. Agenda:. Introduction...
Embedded Programming and Robotics
by aaron
Introduction and Overview. Presented by. John Col...
Robotics
by alexa-scheidler
with Parallax. Tommy Gober, MS. DIY. Who I am…....
NSF National Robotics Initiative:
by briana-ranney
Rapid exploration of robotic ankle exoskeleton c...
NEISD 2012 Robotics Showcase Webinar
by phoebe-click
Brought to you by:. Dave . Mullinix. . &. Ci...
Unlocking New Horizons With Aerial Solutions For Industries
by Eyebot
Aerial solutions are reshaping industries and push...
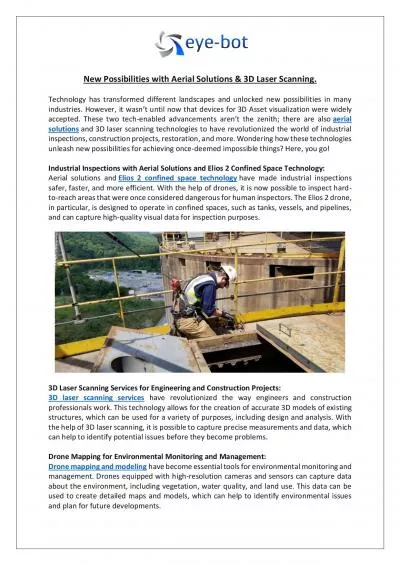
New Possibilities with Aerial Solutions & 3D Laser Scanning.
by Eyebot
Aerial solutions and 3D laser scanning technologie...
Load More...