Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Robot-Karel'
Robot-Karel published presentations and documents on DocSlides.
Karel
by olivia-moreira
. the Robot. A Gentle Introduction to the Art of...
Programming in Karel
by karlyn-bohler
Eric Roberts. CS 106A. January 6, 2016. Once upon...
Algoritmizace a datové struktury
by inventco
(14ASD). 4. cvičení. ZvedniCihlyOdZdi. – . Ka...
Karel čapek Karel Čapek:
by phoenixbristle
Narozen 9. ledna 1890 v Malých Svatoňovicích.....
Common Sense from An Unexpected Source…
by mitsue-stanley
. “. THE KAREL SHOW. ”. ...
Control Flow So Far CS Bridge
by kittie-lecroy
Newspaper . Karel. Build . Efes. . Karel. Very e...
Programming in
by sherrill-nordquist
Karel. Eric . Roberts . and Jerry Cain. CS . 106J...
Stepwise Refinement
by kittie-lecroy
Eric Roberts. CS 106A. January 8, 2016. Outline. ...
A Polyphase Filter for GPUs and MultiCore Processors Karel van der Veldt Universiteit van Amsterdam The Netherlands karel
by lois-ondreau
vdveldtuvanl Rob van Nieuwpoort Vrije Universiteit...
As the name suggests, bitter gourd is bitter on the taste
by trish-goza
History. :-. Native to tropical Asia, the bitter ...
As the name suggests, bitter gourd is bitter on the taste
by ellena-manuel
History. :-. Native to tropical Asia, the bitter ...
Communicative planning theory: change needed to change practice ...
by ellena-manuel
Title: Author: Karel Martens Address: Karel Marten...
Robot Quiz Day 1 What is a Robot?
by kittie-lecroy
A machine that does work on its own. A device tha...
From Robots to
by giovanna-bartolotta
Gorillas. : Computer Programming for Engineers. D...
Healthcare Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Healthcare Robotics Market Report published by val...
Home Care Robotics Market Share, Global Industry Analysis Report 2018-2025
by aniketsh
Home Care Robotics Market report provides the futu...
Robot Web Quest
by kittie-lecroy
Save a copy of this . powerpoint. – click on l...
directionofmotion
by natalia-silvester
Robot Obstacle domainofresponsibility (a)Robottobl...
ROBOT SENSORS AND ROBOT VISON
by marina-yarberry
T. . Bajd. and M. . Mihelj. Proprioceptive senso...
[READING BOOK]-Karel J Robot: A Gentle Introduction to the Art of Object-Oriented Programming in Java
by jonahelmaykol
The Desired Brand Effect Stand Out in a Saturated ...
[eBOOK]-Beyond Karel J Robot: A Gentle Introduction to the Art of Object-Oriented Programming in Java, Volume 2
by jonahelmaykol
The Desired Brand Effect Stand Out in a Saturated ...
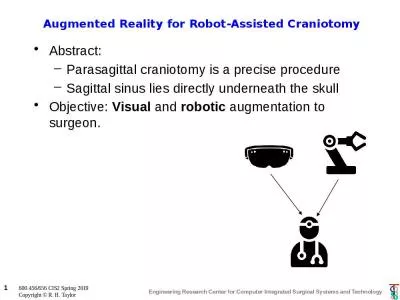
Augmented Reality for Robot-Assisted Craniotomy
by bryan633
Abstract:. Parasagittal craniotomy is a precise pr...
Open versus Robotic REtrOmuscular Ventral Hernia Repair:
by kyrie584
Preliminary outcomes of ORREO trial. Jeremy Warren...
That’s Hot! Robot Brain Programming
by emory
Engineering Challenge. 2. Program your . TaskBot. ...
Designing a robot that can perform the duties of an assistant referee during a football game on the
by hadley
Design a football robot referee. Stay safe. . ...
Exploring Educator Perceptions of Gender and Robotics
by deena
A case study of the I-SET Robotics, a community en...
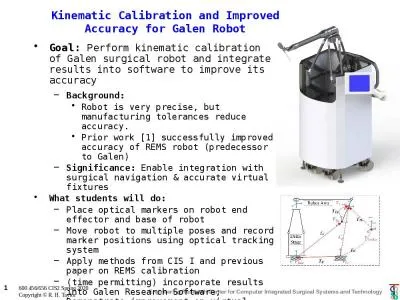
Kinematic Calibration and Improved Accuracy for Galen Robot
by elyana
Goal: . Perform kinematic calibration of Galen sur...
ROBOTIC TOTAL KNEE ARTHROPLASTY
by valerie
COMMON CAUSES OF PERSISENT KNEE PAIN. TREATMENT FO...
Robot arms Stay safe
by bety
Whether you are a scientist researching a new medi...
ROBOT C for CORTEX Teacher Training
by yvonne
VEX Cortex. System Overview. VEX Cortex Microcontr...
Development of 7 Tesla Magnetic Resonance Imaging Guided Robotic System
by jasmine
Michael Zhang. Vancouver June 2019. Content. 4. 1....
Robotic Arm Challenge Dr.
by leah
Parshati. Patel and Sarah Simpson. Robotic Arm. A...
What advice would I give a starting graduate student interested in robot learning?
by BadassBabe
Models! ... Model-free! ... Both!. Slides at www.c...
I can design and annotate a robot
by teresa
What are robots?. . What are they used for? . Wha...
Pololu Zumo 32U4 Robot Users Guide
by martin
20012015 Pololu Corporationhttps//wwwpololucom/doc...
TORUA mobile robot that interacts with its environment TORU can pick
by joyce
DATA SHEET Landsberger Str. 234 80687 Munich T: +4...
ROBOTLtdWeb:www.jiyiuav.comAddress:SouthZangRoad,HuangpuDistrict,Shang
by ashley
GroundStationNewAssistantSoftware AdvancedImproved...
Tommy the Robot
by lily
info@zyrobotics.com 3522 Ashford Dunwood Rd. Suite...
CuBi: A Decluttering Robot
by jiggyhuman
Conceptual Design Review MRSD Team D Stakeholders:...
LEXOThe new standard in robotic gait trainingAND MANUFACTURED IN AUSTR
by inventco
LOWER EXTREMITYIn robotic gait rehabilitation, pat...
Load More...






![[READING BOOK]-Karel J Robot: A Gentle Introduction to the Art of Object-Oriented Programming in Java](https://thumbs.docslides.com/972675/reading-book-karel-j-robot-a-gentle-introduction-to-the-art-of-object-oriented-programming-in-java.jpg)
![[eBOOK]-Beyond Karel J Robot: A Gentle Introduction to the Art of Object-Oriented Programming in Java, Volume 2](https://thumbs.docslides.com/972657/ebook-beyond-karel-j-robot-a-gentle-introduction-to-the-art-of-object-oriented-programming-in-java-volume-2.jpg)