Explore
Featured
Recent
Articles
Topics
Login
Upload
Featured
Recent
Articles
Topics
Login
Upload
Search Results for 'Axes-Robots'
Axes-Robots published presentations and documents on DocSlides.
Introduction to Robotics
by test
Robot. ”programmable, multifunction, manipula...
Mobile Robots Why do robots need to move?
by conchita-marotz
What defines a robot?. Sense. – a robot has to...
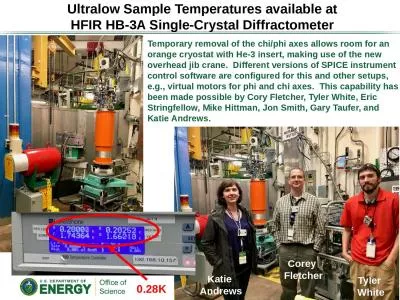
Temporary removal of the chi/phi axes allows room for an orange cryostat with He-3 insert, making u
by valerie
Stringfellow. , Mike . Hittman. , Jon Smith, Gary ...
Rotation of Objects about Two or More Axes
by liane-varnes
Module 8. HigherEdServices.org. Session Topics. R...
Rotation of Objects about Two or More Axes
by stefany-barnette
Module 8. Session Topics. Rotations about Two Axe...
Acceptance and Gender Perceptions of Robots in a U.S. Context
by willow
Kate k. mays & . james. E. Katz. Division of ...
Robots By: Monét, Nitika, and Liz
by claire
What is a Robot??. A . robot. is a machine or...
Robots INST 4200 David J Stucki
by shoulderheinz
Spring 2015. Hard Problems. Hardware. Physics. Mat...
Robots…. Name : Mohammed Ahmed Al
by accompanypepsi
Blooshi. ID : ST 102 11 20 162. Grade : 10.02. Wha...
Telepresence Robots Ayesha Fathima, Breanne Happell, Saraf Rahman,
by dayspiracy
Yan Yan. Overview. What are Telepresence Robots?. ...
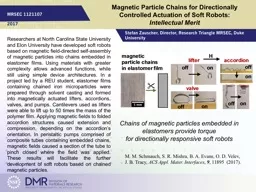
Magnetic Particle Chains for Directionally Controlled Actuation of Soft Robots:
by giovanna-bartolotta
Magnetic Particle Chains for Directionally Contro...
Robots with four wheels Drive forward or back wheels
by conchita-marotz
Drive and turn both forward and back wheels. Sens...
Robots in the Real World
by faustina-dinatale
Advanced Math and Science Academy. iRobot, UMass ...
Wendell Wallach: Ethics, Law, and the Governance of Robots
by sherrill-nordquist
J. Blackmon. Introduction. Alan Turing (1950) and...
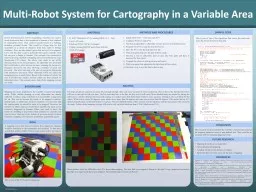
Robots lend themselves well to mapmaking. Any place not ope
by yoshiko-marsland
humans. This research was conducted in order to d...
Emotion and Sociable Humanoid Robots (Cynthia Breazeal)
by sherrill-nordquist
Yumeng. Liao. Usually, robots are designed as au...
Robots in the Classroom
by pasty-toler
What is a robot?. What do you know about robots?....
Famous Robots in History
by phoebe-click
Tom Bickford. Maine Robotics. © 2012. Where it c...
WELDING ROBOTS
by debby-jeon
INTRODUCTION. . Robot Welding . is a process of...
Robots
by giovanna-bartolotta
“Making cogs turn”. Literacy ...
Social Integration of Robots into Groups of Cockroaches to
by test
Modeled collective shelter finding in cockroaches...
Robots
by phoebe-click
By: Monét, Nitika, and Liz. What is a Robot??. A...
Flocks of Robots
by alexa-scheidler
Coordinated . Multi-robot Systems. Dylan A. . She...
Interactive Furry Robots
by natalia-silvester
Fawn . Qiu. Final Project Proposal. Proposal. We...
Whisking with Robots – From Rat Vibrissae to
by giovanna-bartolotta
Biomimetic. Technology for Active Touch. Tony J....
Virtual Inclusion via Telepresence Robots in the Classroom
by pamella-moone
Veronica Newhart, UC Irvine. Dr. Mark . Warschaue...
Binocular Stereopsis How multiple views enable one to reconstruct depth in
by jasmine
the world. Jitendra Malik. UC Berkeley. Binocular ...
MGMT 276: Statistical Inference in Management
by matterguy
Spring, 2014. Welcome. Green sheets. My last name ...
Introduction to Statistics for the Social Sciences
by asmurgas
SBS200, COMM200, GEOG200, PA200, POL200, or SOC200...
Movement Analysis By the end of this topic you should ………….
by tawny-fly
Know the three classes of lever and their use in ...
CS 39 Wallpaper Symmetries
by alexa-scheidler
Carlo H. . Séquin. . EECS Computer Science Div...
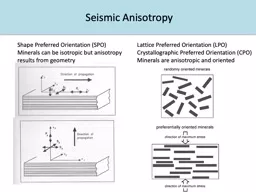
Symmetry Systems
by tatyana-admore
Shear velocity of olivine. Data from . Kumazawa. ...
1 Crystallographic Concepts
by cheryl-pisano
GLY 4200 . Fall, 2016. 2. Atomic Arrangement. Min...
Binocular Stereopsis
by sherrill-nordquist
How multiple views enable one to reconstruct dept...
Welcome to Part III of Machining and CNC
by conchita-marotz
Technology. © 2014 by McGraw-Hill Education. Th...
IE 447 COMPUTER INTEGRATED MANUFACTURING
by jorge363
CHAPTER 9. Material Handling System. 1. IE 447 - C...
Do not fear the robots: The challenge is good jobs at good wages Larry Mishel, President Economic Policy Institute @Larrymishel
by diego189
j. obs at good wages. Larry. . Mishel, President....
Lecture Future Robots Future Medical Delivery Neural
by nash241
11 . – July . 19, . 2012. Today:. Discussion - E...
(BOOS)-Building Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)
by kirostreasure_book
The Benefits of Reading Books,Most people read to ...
Universal Robots
by margaret
A/S Energivej 25 DK - 5260 Odense S CVR - nr. 29 ...
Load More...