PPT-1. Calibrate all sensors in the machine.
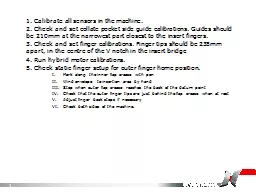
2 Check and set collate pocket side guide calibrations Guides should be 210mm at the narrowest part closest to the insert fingers 3 Check and set finger calibrations
Download Presentation
"1. Calibrate all sensors in the machine." is the property of its rightful owner. Permission is granted to download and print materials on this website for personal, non-commercial use only, provided you retain all copyright notices. By downloading content from our website, you accept the terms of this agreement.
Presentation Transcript
Transcript not available.